تاکنون پروژه های زیادی با موضوع فاصله سنج اولتراسونیک با میکروکنترلر AVR اجرا شده اند که برنامه نویسی اغلب آنها به زبان اسمبلی و بیسیک بوده که در نرم افزار Bascom نوشته شده اند. اما در این پروژه قصد داریم تا برنامه نویسی را به زبان C و در نرم افزار Codevision انجام دهیم. مدار مورد استفاده در این پروژه همان مدار استفاده شده در پروژه فاصله سنج کتاب پروژه های علمی با میکروکنترلرهای AVR می باشد.همان طور که می دانیم هر شخص طراح می بایست دارای سه خصوصیت باشد:
- دایره اطلاعاتی بالایی داشته باشد، یعنی علم به روز و ابزارات جدید را خوب بشناسد.
- شناخت خوبی از سخت افزار داشته باشد (طراحی PCB، شناخت سنسور، میکروکنترلر و ...)
- از یک زبان برنامه نویسی آگاهی کامل داشته باشد (زبان C، پاسکال، اسمبلی و ...)
روش های اندازه گیری ابعادی چرخ دنده ها
آموزش سیستم های اندازه گیری مکانیکی
طراحی و ساخت دستگاه اندازه گیر دور موتور تاکومتر
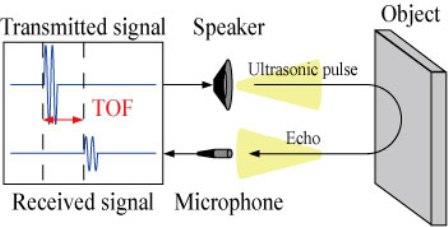
دو مورد اول به مراتب از مورد سوم پیچیده تر می باشند و هرکسی توانایی طراحی سخت افزار و مدار آنالوگ را ندارد. با این حال برنامه نویسی اصولی و صحیح (برنامه نویسی ماژولا) نیز قواعد خاص خود را دارد. در این پروژه سعی شده است تا به اختصار به هر بخش پرداخته شود. در پروژه قصد داریم دستگاهی را طراحی و پیاده سازی نماییم که بتواند فاصله اجسام مقابل، تا خود را بدون تماس دستگاه با آن اجسام اندازه بگیرد. برای این کار به یک جفت سنسور فرستنده و گیرنده مافوق صوت نیاز داریم. سنسور فرستنده اولتراسنیک امواج مافوق صوت را تولید می کند و سنسور گیرنده اولتراسنیک امواج باز تابیده شده از اجسام را دریافت می نماید. با اندازه گیری زمان رفت و برگشت امواج صوتی و با دانستن سرعت صوت، مسافت طی شده توسط صوت و هم چنین فاصله دستگاه تا جسم مورد نظر به راحتی محاسبه خواهد شد. از میکروکنترلر ATmega8 در این پروژه استفاده شده است که چند وظیفه اساسی دارد:
- تولید سیگنال پالس با فرکانس 40khz که در مدار فرستنده مورد استفاده قرار می گیرد.
- اندازه گیری زمان رفت و برگشت امواج صوتی بازتابیده شده از اجسام
- اندازه گیری دما
- محاسبه فاصله و نمایش آن بر روی نمایشگر
در طی مراحل طراحی با مشکلاتی روبرو هستیم که مهمترین آنها متغیر بودن سرعت صوت در دماهای مختلف و تضعیف سیگنال دریافتی توسط سنسور گیرنده است که در ادامه به رفع آنها پرداخته شده است...
تلرانس گذاری ابعادی و هندسی
سئوالات امتحانی درس اندازه گیری دقیق و آزمایشگاه
اصول و روش های هم محوری
پروژه فاصله سنج اولتراسونیک با قابلیت اندازه گیری دما مشتمل بر 2 فصل، 44 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
فصل 1: سخت افزار و توضیح قطعات سخت افزار
- سخت افزار
- میکرو کنترلر AVR
- سنسور اولتراسونیک
- تقویت کننده عملیاتی
- خازن
- مقاومت الکتریکی
- ترانزیستور
- دیود
- تنظیم کننده ولتاژ
- ال سی دی کاراکتری
- لیست قطعات فاصله سنج
- مدار فاصله سنج
فصل 2: نرم افزار
- برنامه نویسی میکروکنترلر
- منطبق برنامه
- شروع برنامه نویسی به زبان C
- برنامه نویسی ماژولار
- منابع
کرنش سنج (استرین گیج)
طراحی و ساخت کمپراتور هوایی فشاری
جزوات و نمونه سوالات امتحانی درس اندازه گیری دقیق و آزمایشگاه

جهت دانلود پروژه طراحی فاصله سنج التراسونیک با قابلیت اندازه گیری دما بر لینک زیر کلیک نمایید.
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مقدمه ای بر تحلیل تنش و طراحی مبدل ها با استفاده از کرنش سنج ها
جزوات و نمونه سوالات امتحانی درس روش های تولید
آموزش جامع ماشین ابزار تولیدی
تولید چرخ دنده به روش هابینگ و شیوینگ
گزارش کار آزمایش های انجام شده در کارگاه توانایی ماشینکاری
پرس ها
ماشین های ابزار
جداول و استانداردهای طراحی
تغییر شکل نیم ساخته ها (جلد 1و2)
تولید کرانویل و پینیون