نرم افزار openSees یک نرم افزار کدباز و رایگان است که با استفاده از روش اجزا محدود به تحلیل انواع سازه ها می پردازد. نام این نرم افزار به صورت مخفف از حروف اول کلمات عبارت Open System for Earthquake Engineering Simulation به معنای سیستم باز جهت شبیه سازی در مهندسی زلزله، گرفته شده است. این نرم افزار توسط زبان برنامه نویسی TCL/TK تولید شده است که قابلیت گسترش و تولید انواع مقاطع سازه ای و غیر سازه ای در خصوص تحلیل را داراست. نرم افزار openSees توسط اعضای دانشگاه کالیفرنیا تهیه و پخش شده است که در این خصوص هیچ شرکت و کمپانی دخیل نمی باشد و این هیأت هیچ ضمانتی در خصوص نتایج حاصل از آنالیز ارائه نداده است. هدف از تهیه نرم افزار openSees پیشبرد هر چه بیشتر تحقیقات می باشد که دانشگاه های جهان روزانه با آن درگیر هستند. از آنجایی که این نرم افزار کد باز می باشد، محققین می توانند مصالح و دستورهای جدید را به کتابخانه این نرم افزار اضافه کنند و رایگان بودن این نرم افزار موجب می شود که به راحتی بتوان در مقالات معتبر جهانی از این نرم افزار بدون نیاز به پرداخت هزینه و خرید، استفاده نمود، که در مقایسه با نرم افزارهای تجاری دیگر مزیت بسیار مهمی می باشد.
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
طراحی سازه و نحوه اضافه کردن مقطع دلخواه در نرم افزار کتیا
بررسی رفتار سازه های لوله ای مهاربندی شده در ساختمان های بلند تحت اثر نیروی زلزله
امکانات نرم افزار OpenSees عبارتند از:
نرم افزار openSees دارای یک آرشیو کامل از انواع رفتارهای خطی و غیرخطی در خصوص تعریف مصالح، المان های فولادی و بتنی و تعریف المان های مختلف در خصوص مدل سازی می باشد. بجز عناصری که در آرشیو موجودی می باشد، کاربر می تواند بصورت اختیاری نیز نوعی از مواد و مصالح و المان ها را برای مدلسازی خود تعریف کند. نرم افزار قادر به تحلیل انواع مدل های خطی و غیر خطی سازه ای و ژئوتکنیکی می باشد. تحلیل ها بصورت انواع تحلیل های استاتیکی و دینامیکی در حالت خطی و غیر خطی انجام می شود که معروف ترین آنها بصورت زیر آورده شده است:
- تحلیل استاتیکی غیر خطی (static pushover Analysis)
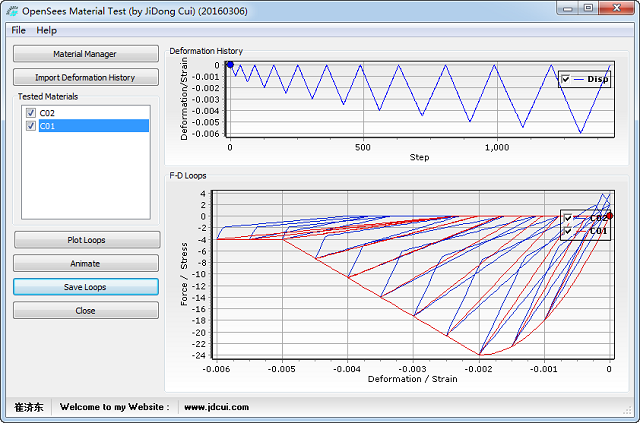
- تحلیل استاتیکی سیکلی (static reversed-cyclic Analysis)
- تحلیل دینامیکی تاریخچه زمانی (Dynamic time-series Analysis)
- تحلیل مدل سازی تحریک یکنواخت پایه (Uniform-support Exitation)
- تحلیل مدل سازی چند تایی پایه (Multi support Exitation)
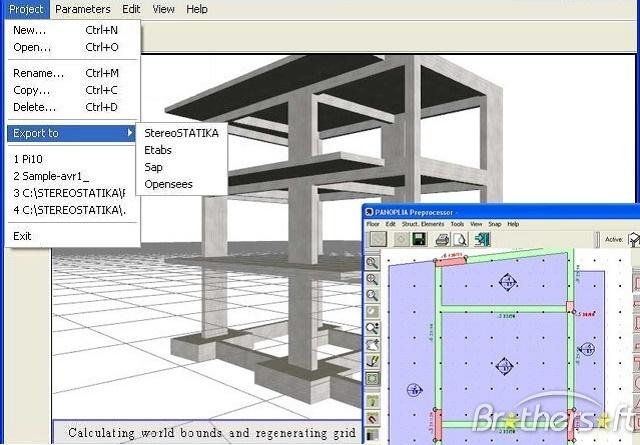
نرم افزار openSees قادر به مدلسازی انواع قسمت های یک المان سازه ای می باشد. می توان گفت نرم افزار فوق تمام قسمت های یک قاب سازه از هر نوعی با هر مصالحی را مدل می نماید. میلگردهای موجود در سطح مقطع یک عنصر، بتن اطراف میلگردها با پوشش حداقل و حداکثر، خستگی در المان ها تحت اثر هر نوع بارگذاری، رفتار هیسترزیس بصورت منحنی نیرو تغییر مکان و... از جمله مسائلی هستند که نرم افزار فوق قادر به مدل کردن و تحلیل آنها می باشد...

کتاب آموزش نرم افزار تحلیلی OpenSees، مشتمل بر 9 فصل، 98 صفحه، با فرمت pdf، به زبان فارسی، همراه با تصاویر، به ترتیب زیر گردآوری شده است:
فصل 1:
- مبانی اولیه در تحلیل سازه ها
- روش های کلی تحلیل سازه ها
- تحلیل الاستیک مرتبه اول
- تحلیل کمانشی خطی
- تحلیل الاستیک مرتبه دوم
- تحلیل مفصل پلاستیک مرتبه اول
- تحلیل غیرخطی مرتبه دوم
- جمع بندی
فصل 2:
- منابع آیین نامه ای
- روش های تحلیل آیین نامه ای
- روش های خطی
- روش های غیر خطی
فصل 3:
- OpenSees چیست؟
- نحوه نصب نرم افزار OpenSees
- نوشتن اولین دستور
- تاریخچه نرم افزار OpenSees
- مثالی از شمع در خاک
- نتیجه گیری
فصل 4:
- مزایا و معایب OpenSees
- سیستم حل در OpenSees
- مدل های المان های غیر خطی
- مصالح موجود
- دستورات TCL
فصل 5:
- مثال آموزشی اول
فصل 6:
- بارگذاری اول (خطی و نقطه ای)
- موتور تحلیل
فصل 7:
- ادامه دستورات موتور تحلیل
- تحلیل استاتیکی (حل بارگذاری اول)
- بارگذاری دوم (نیرو و لنگر نقطه ای)
فصل 8:
- ساخت مقاطع Fiber
- تعریف مقطع بتنی
- تعریف مقطع فولادی
فصل 9:
- مصالح یک جهته یا محوری
فصل 10:
- مثال آموزشی دوم (ستون)
- دمپینگ رایلی
- تحلیل تاریخچه زمانی
- مقدار ویژه در تحلیل مدل
فصل 11:
- نوشتن برنامه (procedure)
- تحلیل استاتیکی غیر خطی تحت بارهای ثقلی
فصل 12:
- تحلیل استاتیکی غیر خطی (پوشاور)
- تحلیل IDA
- تحلیل شبه استاتیکی (سیکلیک)
* توجه:
لازم به ذکر است که به همراه فایل کتاب آموزشی بالا، موارد زیر نیز جهت دانلود قرار داده شده است:
- فایل 1: کتاب با عنوان: OpenSees Command Language Manual (به زبان انگلیسی، 452 صفحه، با فرمت pdf)
- فایل 2: کتاب با عنوان: OpenSees Examples Primer (به زبان انگلیسی، 156 صفحه، با فرمت pdf)
- فایل 3: جزوه با عنوان: مدل سازی و تحلیل قاب خمشی فولادی با نرم افزار OpenSees (به زبان فارسی، 32 صفحه، با فرمت pdf)
- فایل 4: جزوه با عنوان: نکاتی از آموزش نرم افزار OpenSees (به زبان فارسی، 21 صفحه، با فرمت pdf)
- فایل 5: جزوه با عنوان: مروری بر آنالیز اجزای محدود سازه ها (به زبان فارسی، 8 صفحه، با فرمت pdf)
- فایل 6: جزوه با عنوان: منحنی پوش آور و تعیین سختی و تغییر مکان غیر خطی سازه در OpenSees (به زبان فارسی، 6 صفحه، با فرمت pdf)
- فایل 7: جزوه با عنوان: تعریف مقطع Section Command در نرم افزار OpenSees (به زبان فارسی، 6 صفحه، با فرمت pdf)
محاسبه حجم عملیات خاکبرداری و خاکریزی با نرم افزار اتوکد لند
نرم افزار توسعه زمین و طراحی عمرانی
تحلیل تیر سراسری با استفاده از نرم افزار متلب
جهت دانلود کتاب آموزش نرم افزار تحلیلی OpenSees به همراه فایل های پیوست، بر لینک زیر کلیک نمایید.
آموزش نرم افزار تحلیلی OpenSees
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند: